- 来源:广州市广精精密仪器有限公司
- 时间:2015-01-21 11:08:10
- 字体:大 中 小
- 阅读:
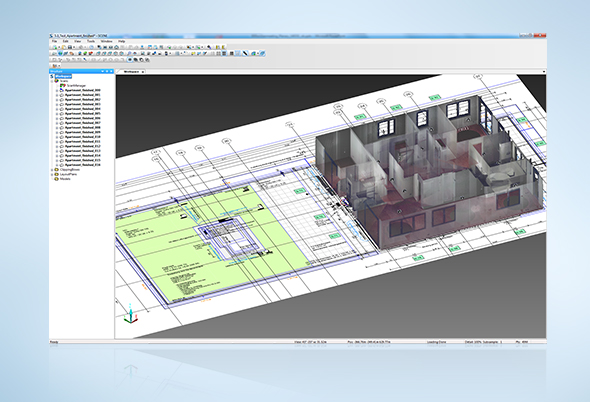
FARO大空间三维激光扫描仪软件

FARO SCENE 软件是一种适用于专业用户的全面三维点云处理和管理软件工具。它专门用于查看 、管理和使用从高分辨率三维激光扫描仪(如 FARO Laser Scanner Focus3D激光扫描仪)获得的各种三维扫描数据。
SCENE 通过使用自动对象识别、扫描拼接和定位,能够高效轻松地处理和管理扫描的数据。
在 SCENE 准备好扫描数据后,您即可立即进行评估和进一步地处理。因此您可以自行选择各种简单易用的功能 – 从简单测定到三维可视化,再到网格划分和导出到各种点云和 CAD 格式。有了 SCENE WebShare,现在可以将您的扫描对象发布到互联网上,并可使用互联网共享您的扫描项目。
功能
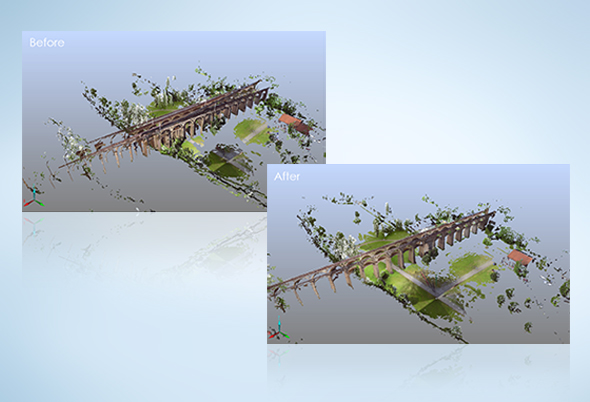
基于“俯视图”的无靶标配准
FARO开发的一种高效、多功能和独一无二的方法。在无法对单次扫描进行可靠的GPS预先定位的内部和建成区域,它提供了一种高效和具有较高自动化的配准方法。
基于“云对云”的无靶标配准
利用重叠的扫描数据和其他信息(包括GPS、罗盘和高度计信息)来准确地配准多个激光扫描项目。
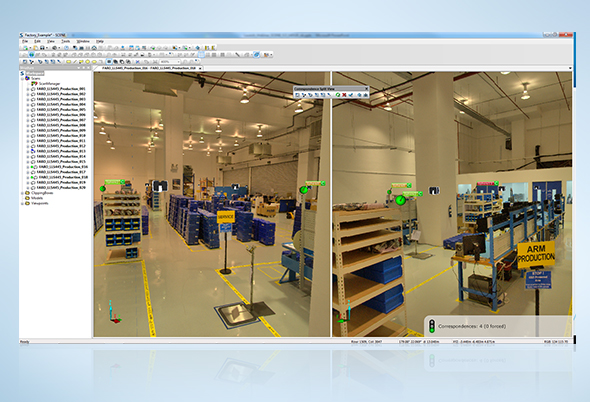
对应分割视图
通过快速的手动用户互动来实现扫描定位。匹配相邻扫描图像中的相同区域来解决位置信息缺失。
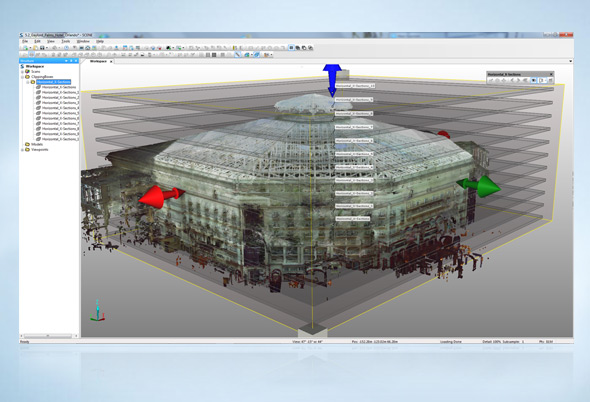
布局图像叠加
允许用户使用图像文件、CAD图纸或地图将扫描数据放在其地理环境中,实现立面和剖面的可视化。
创建正射影像
导出可用于任何二维和三维CAD系统的压缩图片。
创建Octree扫描图像的性能更佳
性能提高6倍(无需三分钟,只需半分钟就能创建¼分辨率的扫描图像)。
许可解决方案
软锁、硬锁、网络许可证
自动精确配准
在精确配准期间,SCENE使用了当前扫描簇的成对对应功能。主要用来优化扫描定位(使用自然特征时)。
集成项目数据库
无缝地存贮项目信息。现在,无论处于工作流程中的哪个阶段,用户都可以在扫描数据库时返回至任何步骤。
ASTM E57行业标准
不受制造商约束的二进制数据交换格式, 支持使用E57文件格式来导入和导出扫描数据。该文件格式已在 2010 年被定义为 ASTM 2807 标准,这意味着它已成为点云数据的标准交换格式。
立体视觉
可以使用安装有NVIDIA quadro或更高级显卡的电脑、三维电视机和三维投影机绘制具有立体视觉的三维视图。
网络共享(WebShare)
在网络服务器上发布扫描项目, 通过互联网轻松实现数据共享。
- ·FARO Focus3D法如便携式3D扫…
- ·Laser Scanner Photon大空间…
- ·Gage 最新柔性在线三坐标测…
- ·Gage 便携式三坐标测量机 便…
- ·Laser Tracker Xi系列激光跟…
- ·Laser Tracker X系列激光跟…
- ·ScanArm V2 便携式三维激光…
- ·ScanArm V3 便携式三维激光…
- ·Fusion FaroArm系列关节臂式…
- ·Quantum FaroArm系列关节臂…
- ·FaroArm-Platinum 铂金便携…
- ·CNC系列全自动二次元测量仪…
- ·VMS系列光学影像测量仪
- ·便携式三坐标测量机 关节臂…
- ·FARO CAD Zone 三维 CAD 绘…
- ·FARO SCENE 大空间三维激光…
- ·FARO CAM2 SmartInspect 三…
- ·FARO CAM2 Measure 10 三坐…
- ·Focus3D X130大空间三维激光…
- ·Focus3D X330大空间三维激光…
- ·Freestyle3D 手持式激光扫描…
- ·FARO 3D Imager三维成像仪
- ·FARO TrackArm激光跟踪便携…
- ·FARO 激光跟踪仪 ION - 基于…
- ·Vantage 激光跟踪仪
- ·便携式三维激光扫描臂FARO …
- ·便携式三维激光扫描测量臂F…
- ·便携式三维激光扫描测量臂F…
- ·便携式三坐标测量机FARO Ga…
- ·便携式三坐标测量臂 FaroAr…
- ·便携式三坐标测量仪 Prime
- ·便携式三坐标测量仪 FARO …
- ·便携式三坐标测量臂 M系列测…